
تلهآپریشن و جراحی رباتیک
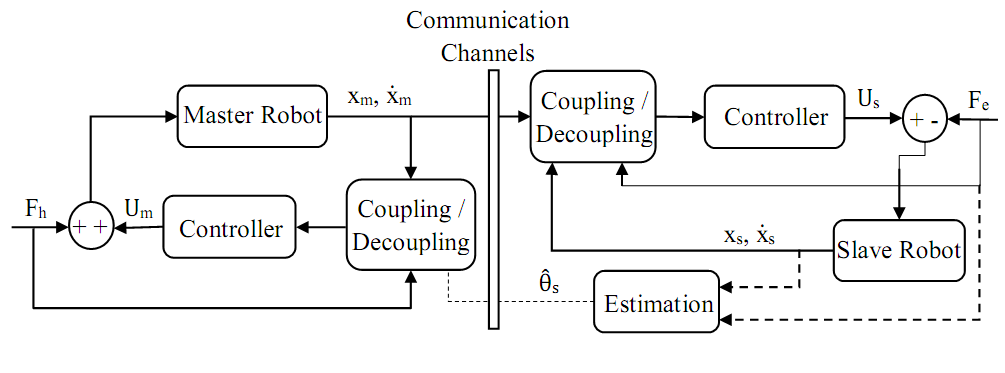
جراحی مبتنی بر رباتیک در دهههای گذشته به یکی از زمینههای مهم پژوهشی تبدیل شده است. یکی از شاخههای این پژوهش، جراحی از راه دور (یا به طور عام، تلهآپریشن) استکه بدین معناست که جراح بصورت غیرمستقیم بتواند عمل جراحی را انجام دهد. این کار بوسیله رباتهای رهبر و پیرو انجام میپذیرد. این روش جراحی بسیار پربازده و سریع است و میتواند جایگزین مهمی برای روشهای جراحی سنتی باشد.
در آزمایشگاه بیومکاترونیک، به عنوان مراحل اولیه پژوهش، مدلسازی دینامیکی، توسعه روشهای کنترلی مرتبط، و نیز بهبود و افزایش شفافیت سیستمهای تلهآپریشن در حوزه این محور پژوهشی قرار میگیرد. همچنین تلهآپریشن در بستر اینترنت نیز از پروژههای پژوهشی فعال در این زمینه است.
ربات راهرونده غیرفعال سهبعدی
تا به امروز، رباتهای موفق راهرونده دوپا، رباتهایی بودهاند که دارای موتورهای فعال همراه با مصرف انرژی و نیز پاهای بزرگ پهن برای حفظ پایداری بودهاند و برای کنترل پایداری خود از معیارهای پایداری مانند ZMP بهره جستهاند و معمولاً برای حرکت از دنبال کردن مسیر در مفاصل خود استفاده کردهاند. این رباتها معمولاً مصرف انرژی بالایی دارند و برای حفظ پایداری خود باید حجم محاسباتی بالایی متحمل شوند.
رباتهای غیرفعال که بصورت دینامیکی پایدار هستند، به طرز زیبا و عجیبی میتوانند راهرفتن انسان را تقلید کنند. به همین علت است که تلاشهای زیادی شده است که این رباتها بستری برای طراحی و ساخت رباتهای راهرونده قرار داده شوند که هم انرژی مصرفی کمتری داشته باشند و هم راهرفتنشان مشابه راهرفتن انسان باشد. تاکنون اکثر تحقیقات در دنیا در این حوزه بر روی رباتهای غیرفعال دوبعدی متمرکز بوده است. با این وجود تحقیقات بسیار اندکی نیز بر روی رباتهای راهرونده غیرفعال با قابلیت حرکت در همه فضای سهبعدی انجام شده است و از این میان، تعداد بسیار بسیار اندکی نیز حرکت چرخش این رباتها را مورد توجه قرار دادهاند. معمولاً پایداری دینامیکی مبتنی بر سیکل حدی برای حرکت مستقیمالخط این رباتها بررسی میشود، ولی واضح است که برای حرکت چرخشی، چنین رویکردی بسیار سخت و دشوار به نظر میرسد. در اینجا ضمن اثبات وجود چنین حرکت پایداری، مدلسازیهای مربوطه انجام پذیرفته است و شرایطی که تحت آن وجود چنین حرکت پایداری تصمین میشود نیز بررسی شده است. تحقیقات در زمینه انجام آزمایشات برای اثبات نتایج شبیهسازی در حال انجام است.

حرکت رباتهای دوپا با ساختار نامتقارن
رباتهای دوپای معمولی دارای ساختار متقارن هستد و بنابراین میتوان در تحلیل گامبرداری آنها، از فرض تقارن گامبرداریهای متوالی استفاده کرد. با این وجود، وقتی تقارن در ساختار این رباتها وجود نداشته باشد، رفتار دینامیکی این رباتها کاملاً تحت تاثیر قرار خواهد گرفت و ممکن است به ناپایداری سیستم منجر شود. از طرفی داشتن یک مدل نامتقارن برای ربات دوپا میتواند ما را در فهم برخی مفاهیم طراحی و تحلیل گامبرداری در افراد قطععضو با اندامهای مصنوعی بسیار کمک کند. در این پژوهش پس از مدلسازی یک ربات با ساختار نامتقارن و درجات عملگری ناکافی، در ابتدا گامبرداری پایداری برای آن طراحی شده است و نشان داده شده است که این گامبرداری دارای پایداری دینامیکی مجانبی است. سپس تحقیقات برای طراحی گامبرداری بصورت واقعی و از طریق اطلاعات اخذ شده از راهرفتن انسان در دست انجام است. برای این منظور از دوربین-سنسور کینکت ایکسباکس یک استفاده میکنیم.

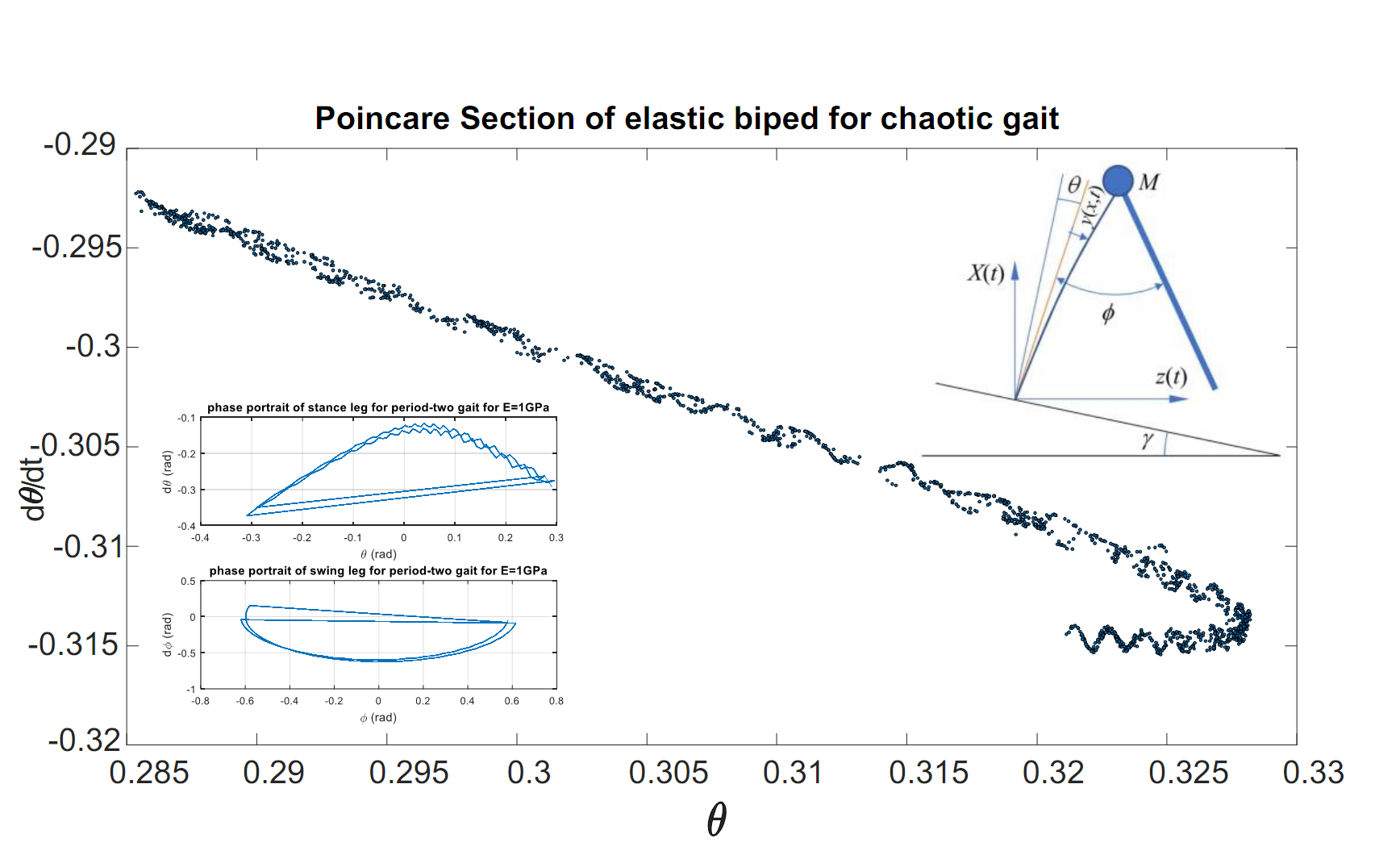
ربات راهرونده دوپای غیرفعال با پاهای الاستیک
ربات راهرونده دوپای غیرفعال به صورت معمول دارای شرایط و ویژهای برای انجام راهرفتن پایدار است. اگر فرض الاستیک بودن پاها را به آن اضافه کنیم، قطعاً شرایط ویژهتر خواهد شد و بررسی چنین وضعیتی از بعد دینامیکی بسیار مشکل و مهم خواهد بود. ارتعاشات و خیز ناشی از الاستیسیته در پاها و درجات آزادی پیوستهای که این مساله در ربات پیش خواهد آورد، نیازمند بررسیهای دقیق برای یافتن حرکت پایدار است. در این پژوهش، نشان داده شده است، که ربات دوپای غیرفعال با پاهای الاستیک دارای حرکت پایدار یک-پریود و دو-پریود و نیز حرکت پایدار آشوبناک نیز هست. همچنین اثر تغییرات پارامترهای مختلف سیستم در وضعیت پایداری سیستم بررسی شده است.
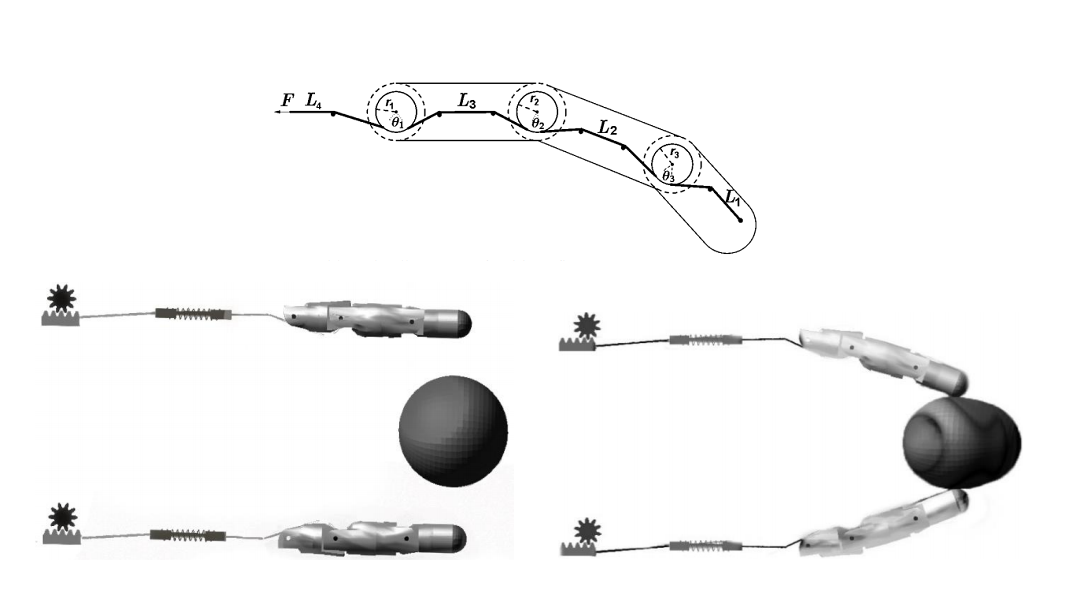
دست رباتیک و گیرش (گِرَسپ) نرم
انگشتان انسان به دلیل نوک نرمی که بافتهای آن دارند، قابلیت گرفتن اشیاء مختلف در شرایط مختلف را دارا هستند؛ بخصوص وقتی در تعامل با اشیاء غیرصلب و نرم هستند. پایداری یک فرآیند گیرش، به شرایط تماسی بسیار وابسته است. غلتش محض (بدون لغزش) یک قید تماسی است که با این مساله گره خورده است؛ در این پژوهش به به مدلسازی این نوع از تماس و تاثیر آن در فرآیند گیرش میپردازیم و برای اینکه بتوانیم گیرش پایداری داشته باشیم، از کنترلرهای امپدانس-مکان استفاده میکنیم. برای تایید نتایج شبیهسازی، مکانیزمهای طراحی و ساختهایم تا بتوانیم به صورت عملی درستی ایدههای خود را مورد واکاوی قرار دهیم.


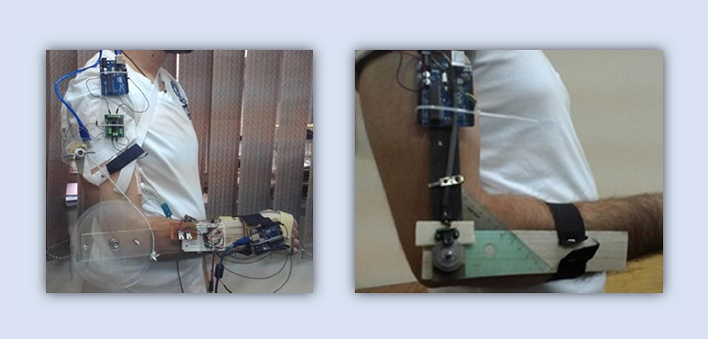
توانبخشی رباتیک و رباتیک یاریگر
سیستمهای رباتیک میتوانند به عنوان سیستمهای توانبخشی و یاریکننده به افراد معلول مورد استفاده قرار گیرند. اگر هرگونه جراحتی باعث از دست رفتن عملکرد قسمتی از بدن انسان شود، پای این حوزه از رباتیک به زندگی انسان گشوده خواهد شد. در آزمایشگاه رباتیک، تحقیقات اولیهای برای توسعه برخی سیستمهای رباتیک توانبخشی صورت گرفته است. در این زمینه ربات پوشیدنی سادهای با یک درجه آزادی برای بالاتنه و برای دست طراحی شده است که برای عملکرد خود از فیدبک مکانی و نیز فیدبک سیگنالهای EMG استفاده میکند. پژوهش در این زمنیه همچنان در حال انجام است. همچنین نمونههایی از زانوهای مصنوعی و نیز زانوهای کمکحرکتی در حال طراحی و ساخت و آزمون است.

ماهی رباتیک
ربات ماهیشکل گونهای رباتهای زیستی و الهامگرفته از طبیعت است که ظاهر و حرکتی شبیه به ماهی دارد و در آب حرکت میکند. در این زمینه میتوان پارامترهای مختلف را در بازدهی حرکتی ربات و مانورپذیری آن مورد بررسی قرار داد. در آزمایشگاه بیومکاترونیک، این پروژه برای دانشجویان کارشناسی و صرفاً برای تهییج آنها و آشنایی با مفاهیم مکاترومیک و رباتیک و نیز الزامات سیالاتی این مساله، تعریف شده است.
در گام اول، یک مدل ساده از ماهی رباتیک توسعه داده شده است که با آردوینو قابل کنترل است و در آن میتوان مفاهیم پایهای مربوطه را به دانشجویان آموزش داد. الزامات هیدرودینامیکی و مدلسازی دینامیکی سیستم از مهمترین مسایل پیشروی این پروژه هستند.

