
Teleoperation and Robotic Surgery
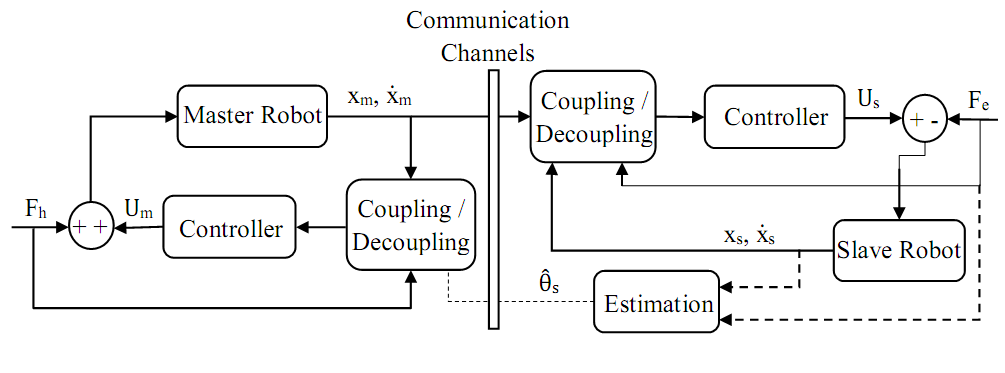
Robotic-based surgery has become a prominent research field in recent decades due to the advent of new surgery procedures, such as minimally invasive surgery. One of the main branches of this research field is telesurgery (or more generally teleoperation), which means that the surgeon indirectly operates a surgical operation from a long distance by means of master and slave robots. This method of surgery is more efficient and time-saving and can be a suitable replacement for typical direct methods.
Dynamic modeling, developing control methods and augmenting transparency of teleoperation systems are our main concerns in this research theme. In parallel, we are trying to study and implement internet-based teleoperation.
Three Dimensional passive biped walker
To date, the most successful biped robots are fully actuated humanoids with big flat feet, controlled on the basis of the equilibrium point stability criteria like ZMP (Zero Moment Point) and time tracking of joints’ trajectory. These robots typically use high computational effort and energy consumption for walking or controlling the stability.
Dynamically stable passive biped robots mimicking human locomotion. Applying this idea enabled the robots to walk more naturally and with higher efficiency (less energy consumption) than their earlier set. Up to now, the research on these robots have been well developed for 2D biped models whose motions are restricted to the sagittal plane. However, relatively few studies have analyzed such biped robots in the general 3D case and even fewer have addressed their tuning motions. Formerly, the existence of stable periodic gaits for straight walking of passive biped walkers was well known and investigated as the notion of passive dynamic walking. This research is aimed to elaborate this notion in the case of three dimensional (3D) walking and extend it for other maneuvers, specifically curved walking or turning.

Locomotion of Biped Walkers with ASYMMETRIC Structure
Usual robotic biped walkers have symmetric structures so that we can deal with their corresponding gating as a symmetric gaiting problem. However, when the symmetry condition is violated, the dynamical behavior of the system would be dramatically affected resulting in stability issues. In the other hand, a walker robot with asymmetric structure could help us to understand some aspects of gaiting design for amputees with artificial prosthesis. Having modeled the dynamical behavior of such robot with some degrees of under-actuation and found asymptotic, stable gaiting for it, we are now trying to give a human-gaiting-inspired design in order to obtain low-energy-consuming, stable gaiting for the robot. We use a Kinect (Xbox one) camera to obtain experimental data.

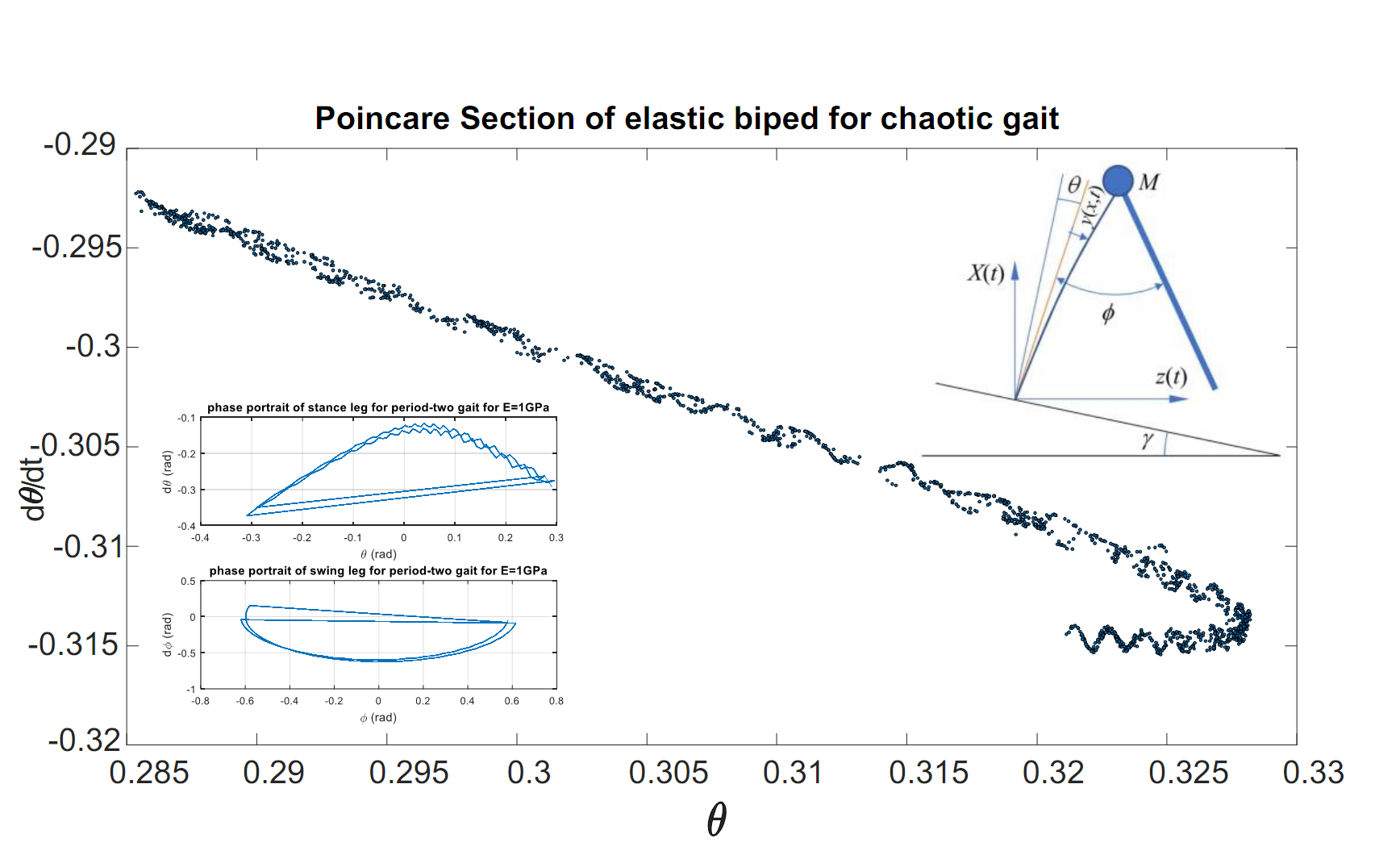
Passive Biped Walker with Elastic Limbs
A passive compass-gait biped walker with fully elastic stance leg is does have a very nonlinear dynamics. Therefore it will have deflections and vibrations. It is shown that a period-one gait can be found for various values of Elasticity and damping coefficients. Furthermore, the motion bifurcates into a stable period-two gait as the slope of the ramp increases. The stable chaotic solution was investigated for the elastic passive biped walker.
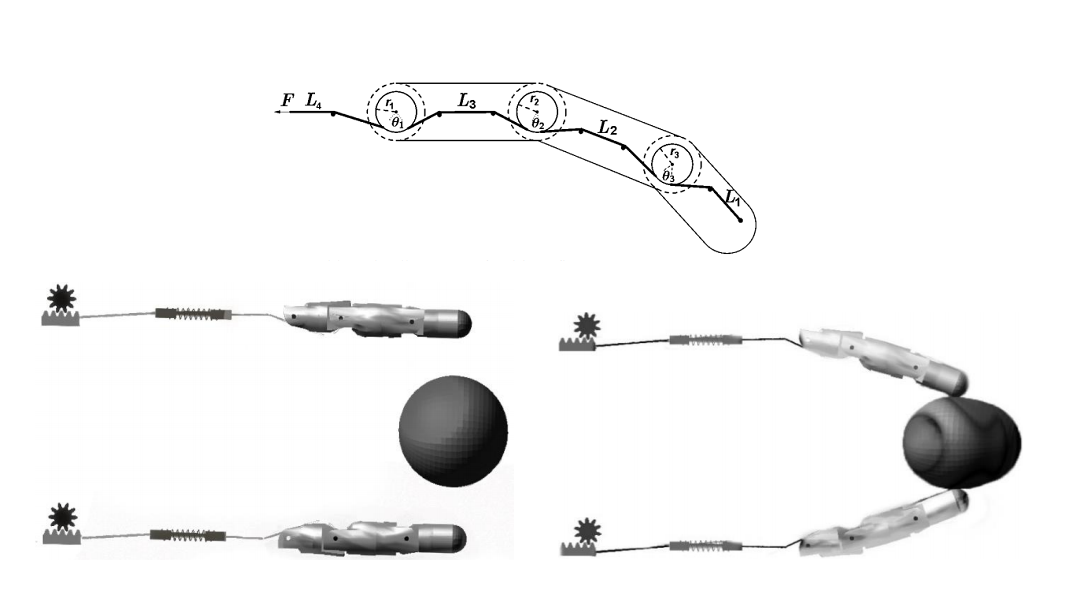
Robotic Hand and Soft Grasp
Soft- tips in human fingers play a great role in object grasping; especially when talking about isotropic and elastic matters. In other words, stability of a typical grasp is exceedingly dependent on contact conditions. Pure rolling (without slippage) is a kind of contact constraint which is greatly tied with this
feature; we have focused on modelling this type of contact where the problem of grasping an elastic object by a set of soft-tip fingers does exist. Modeling, a position-based impedance control, and experiments are our first steps in this research. Fabricating a robotic hand is the next step toward the real model of soft grasp.


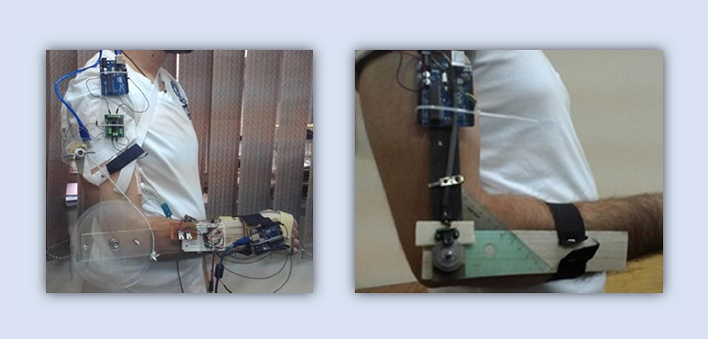
Rehabilitation and assistive Robotics
Robotic systems could be incorporated for rehabilitating and assisting humans with special disabilities. If any unrecoverable injury or loss of function happens to its body parts, it becomes a challenge to provide assistive and/or rehabilitating devices which are able to recover every aspect of the lost functionality. In BACE lab, we are in early stage of this project; an upper-limb, EMG-excited, simple exoskeleton was our first output in this regard.

Robotic Fish
A robot fish is a kind of bionic robot, which has the shape and locomotion of a living fish. In this research, we investigate the effect of design parameters on the efficiency of the robotic fish. In BACE Lab it is an undergraduate-level project for interested senior undergraduate students who want to be familiar with robotics and mechatronics projects.
In the first step, a simple model of the robot will be made as a conceptual and developing model. The hydrodynamics approach to the problem and the modelling of the system are the most important issues in this direction.

